
Precise target data generation in real time
Triamec servo drives feature local path planning for point-to-point applications with truly jerk-limited motion profiles and reprogramming capability in just 100 µs. For coordinated movements of multiple servo axes, superior control is provided by:
- Tama program on a servo drive or adapter card
- Real-time tables in an adapter card
- A host PC with real-time environment (TwinCAT from Beckhoff)
Local path planning at 10 kHz
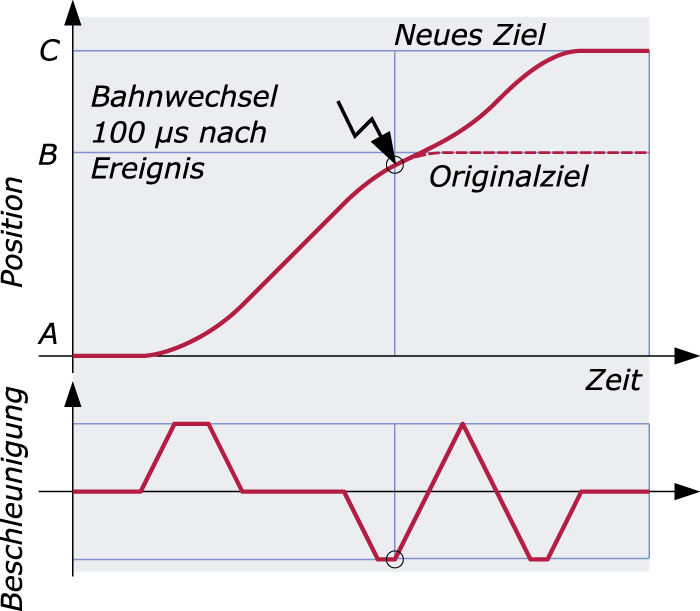
The path planning in the servo drive generates target data in a 10 kHz cycle, truly jerk limited and with all usual parameters. "Truly jerk limited" means that a constant, definable jerk value is used and not just a jerk time. The true jerk limitation requires more computing effort, but is easier and more intuitive to use and makes more sense physically.
Thanks to novel algorithms, a path change can be calculated and implemented in just 100 μs. This enables sophisticated applications with sensor-controlled processes in the range of milliseconds and micrometers:
- Event-controlled path planning, sensor-guided paths
- Touch-Down detection and travel to a relative target
- Late path correction e.g. in vision guided systems (die bonding)
External path planning with real-time target data
Via Tria-Link or other interfaces, external CNC nominal data, e.g. CNC target data calculated on a central computer, can be transmitted to a servo drive. These are preferably received by the servo drive as P,V,A triplets (position, velocity and acceleration) and are physically correctly interpolated for the internal position control.
The target data must be sent to the servo drive in a fixed cycle. For this purpose, a real-time system such as TwinCAT from Beckhoff is typically used on the host computer.
For pre-calculated paths, such as those used for CNC applications or in optics, the Triamec Motion System eliminates the need for a real-time environment. The Triamec Tria-Link adapter cards feature real-time tables, which relieves the application of real-time requirements, which is an economic advantage and greatly simplifies programming.