
Erzeugung der PWM-Ausgangsspannung
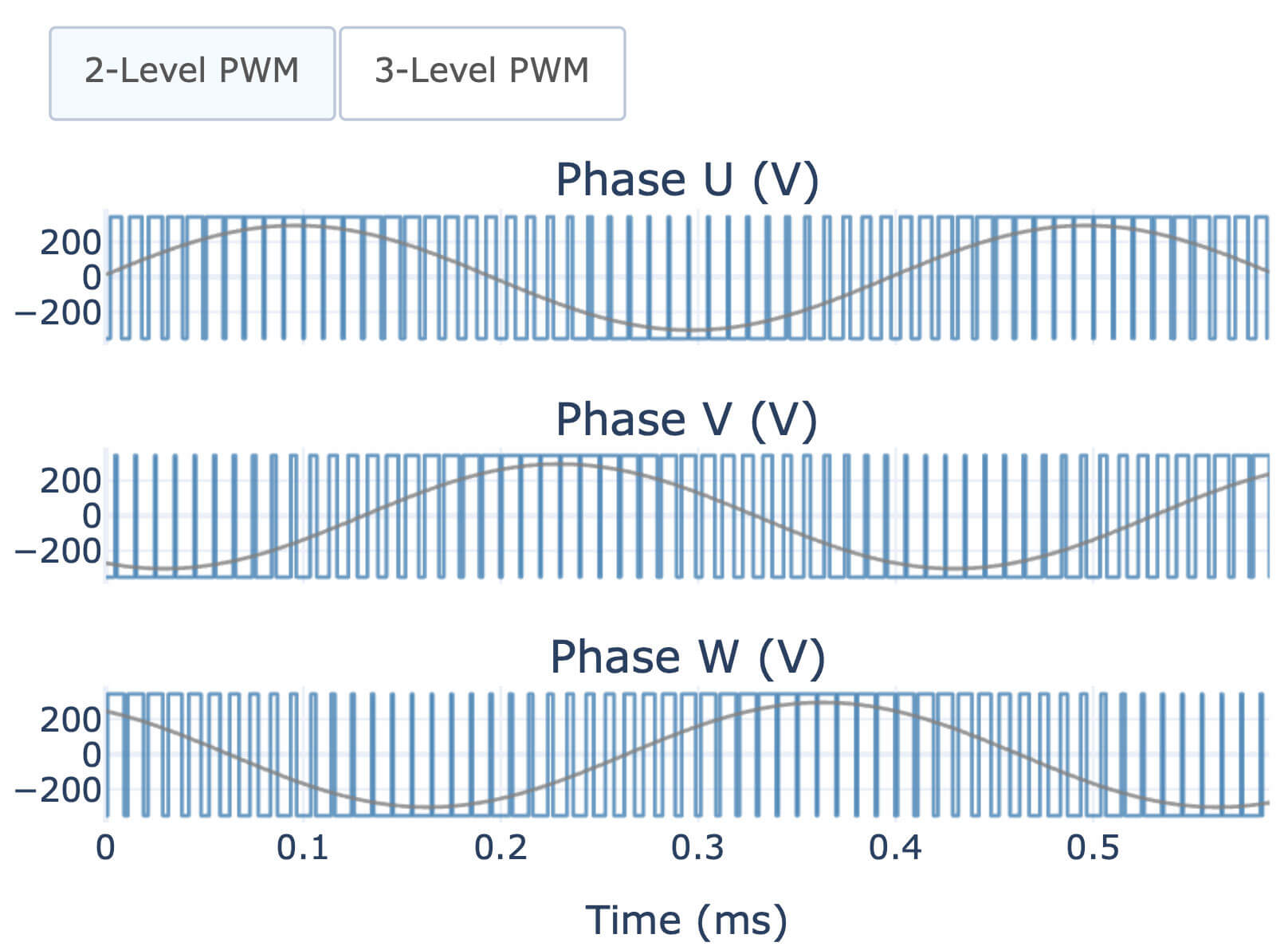
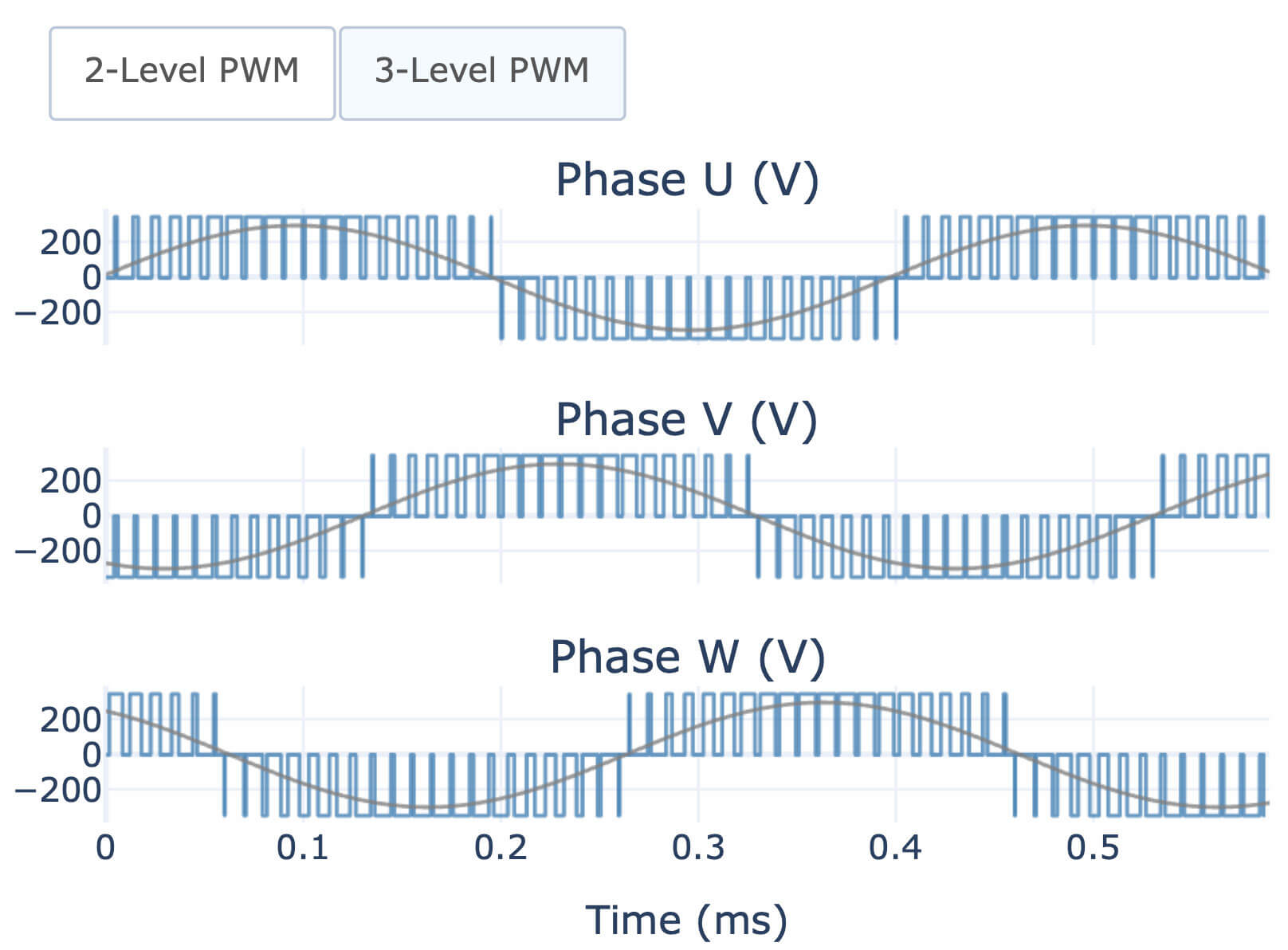
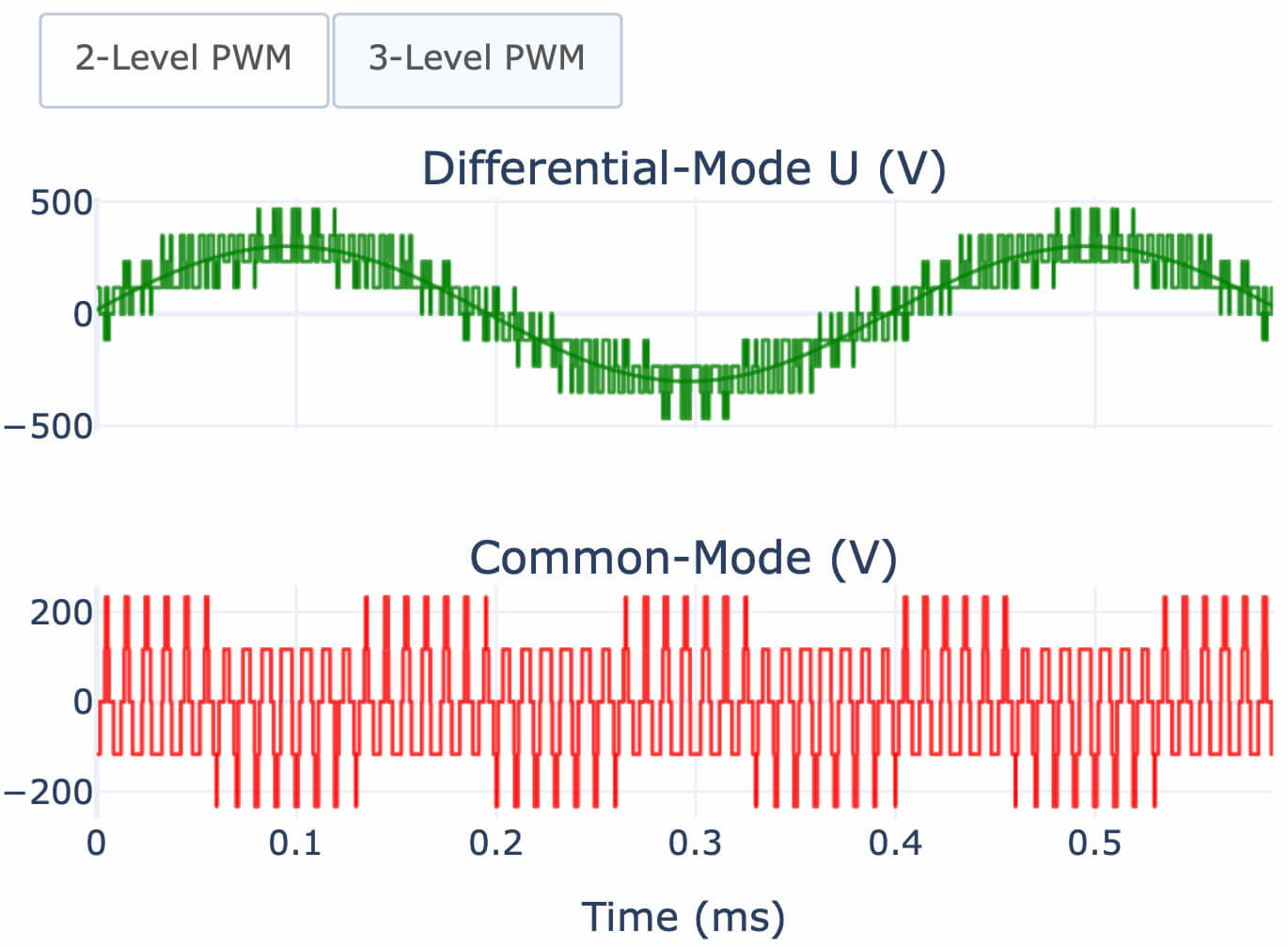
Die Ausgangsspannung eines Servoantriebs wird mittels Pulsweitenmodulation (PWM) erzeugt, die schnell zwischen den hohen und niedrigen Schienen des Gleichstrombusses umschaltet. Das hier gezeigte Beispiel vergleicht die Ausgabe von 2-stufiger und 3-stufiger PWM mit einem 700-V-Gleichstrombus bei einer PWM-Frequenz von 100 kHz. Die Zielwellenform entspricht einem typischen Spindelmotor mit einer Induktivität von 230 μH, der bei einer Last von 5 A mit 150.000 U/min dreht. Während die 3-stufige PWM eine mittlere Spannung einführt, um die Schaltamplitude zu reduzieren, erzeugen beide Methoden scharfe Übergänge bei der PWM-Frequenz.
Die Phasenspannung wird zwischen dem Antriebsausgang und Erde gemessen. Im praktischen Betrieb wird diese Spannung typischerweise in zwei Komponenten analysiert:
- Differential-Mode-Spannung (DM) – die Nutzspannung an den Motorwicklungen
- Common-Mode-Spannung (CM) – der Durchschnitt aller Phasenspannungen, der nicht zur Drehmomentbildung beiträgt
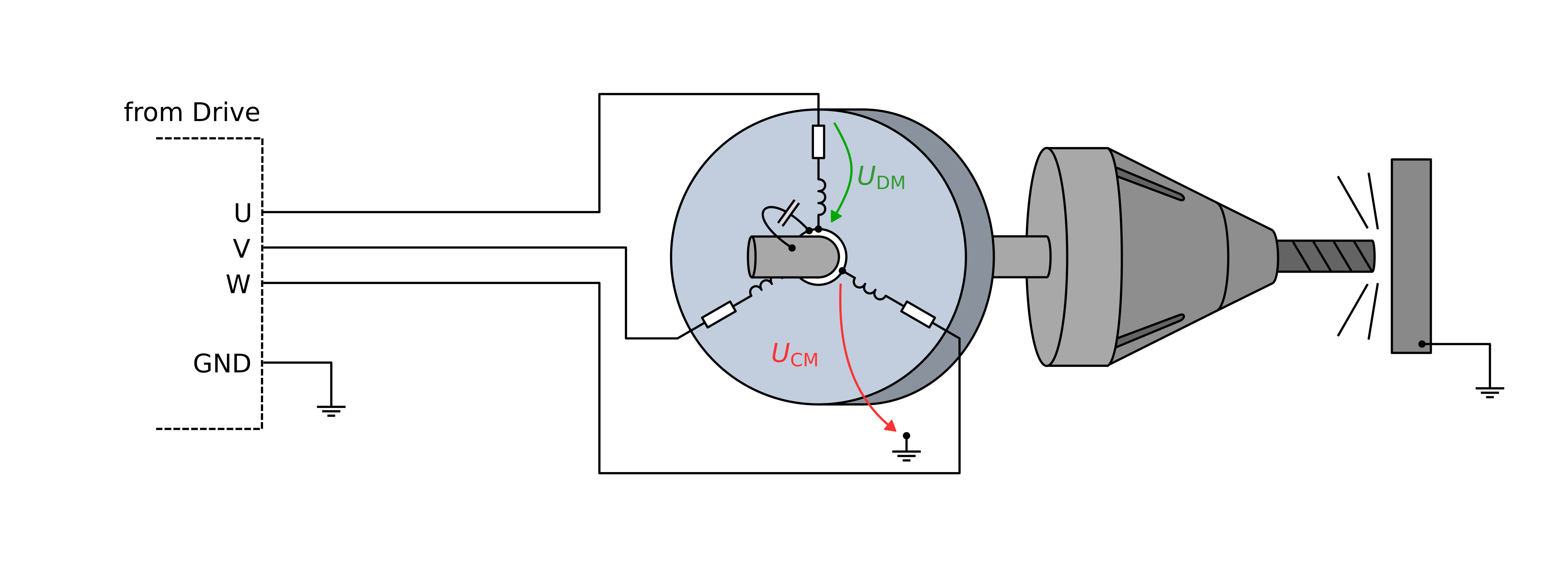
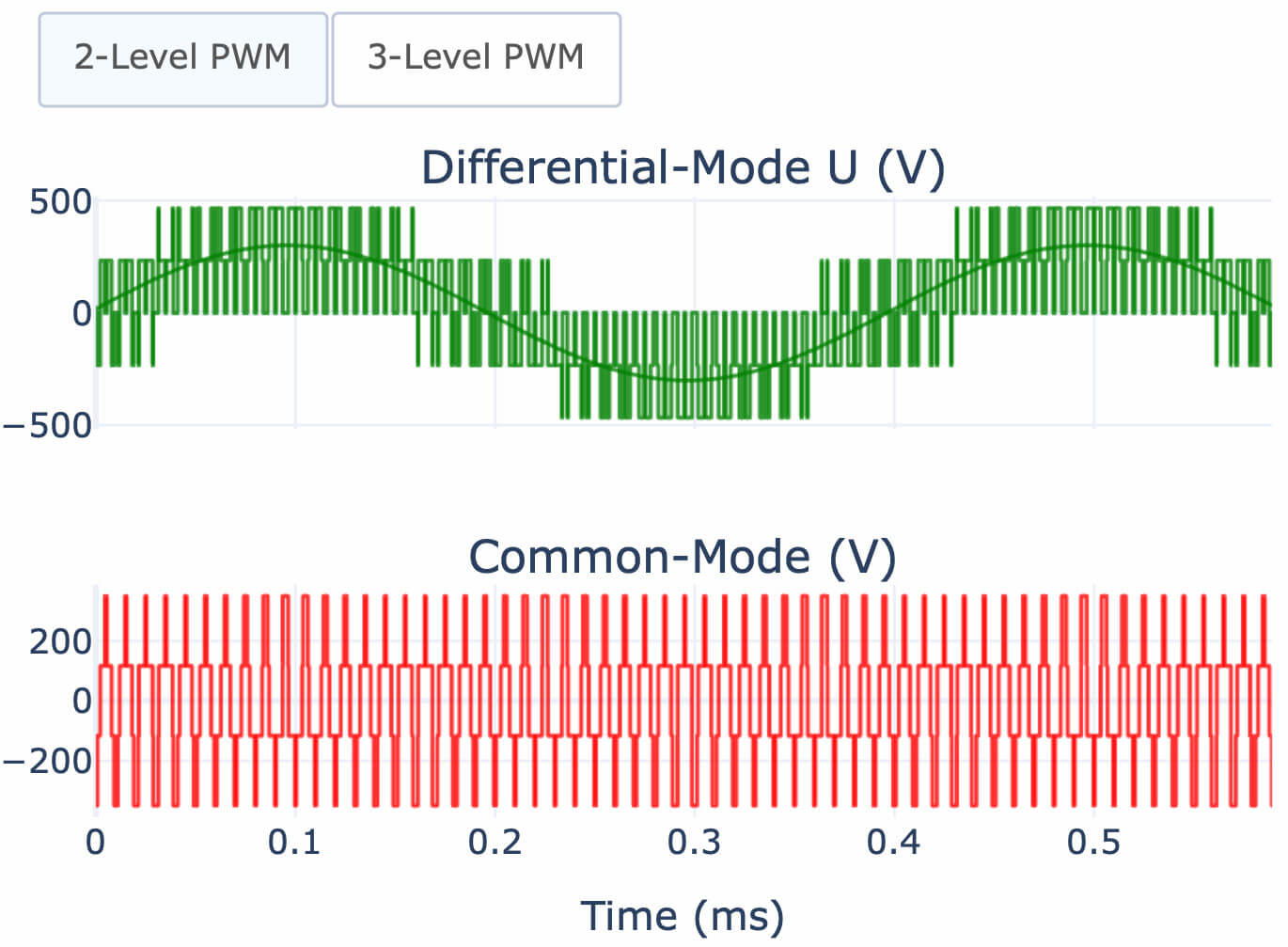
Die Differential-Mode-Spannung bestimmt den Motorstrom und das Drehmoment. Die Common-Mode-Spannung hingegen ist ein Nebenprodukt der PWM-Schaltung und schwingt typischerweise über den Bereich der Gleichstrombusspannung mit der PWM-Frequenz selbst.
Das elektrische System des Motors wirkt als Tiefpassfilter für den Strom, sodass die PWM-Spannung zu einem relativ gleichmässigeren Strom und Drehmoment führt. Die Common-Mode-Spannung hat keinen direkten Einfluss auf den isolierten Motor.
Probleme im Differential-Mode
Obwohl der Motor die Differential-Mode-Spannung filtert, bleibt eine Stromwelligkeit bestehen. Diese Stromwelligkeit verursacht zusätzliche Belastung und Erwärmung in den Motorwicklungen und führt zu thermischen Problemen am Rotor.
Probleme mit Common-Mode
Bei der Bearbeitung geerdeter leitfähiger Werkstücke entsteht zwischen Motor und Erde ein kapazitiver Pfad. Dadurch können Verschiebungsströme fliessen, was zu
- Elektrische Lichtbögen an Motorlagern oder Werkzeugkontaktpunkten, die sowohl den Motor als auch das Werkstück beschädigen
- Elektrochemische Erosion, die mechanische Komponenten und Werkzeuge allmählich abnutzt
Darüber hinaus ist die Common-Mode-Spannung eine wichtige Quelle elektromagnetischer Störungen, insbesondere bei Schwingspulen- und offenen Motoren, was zu Systeminstabilitäten und zur Nichteinhaltung der EMV-Anforderungen führt.
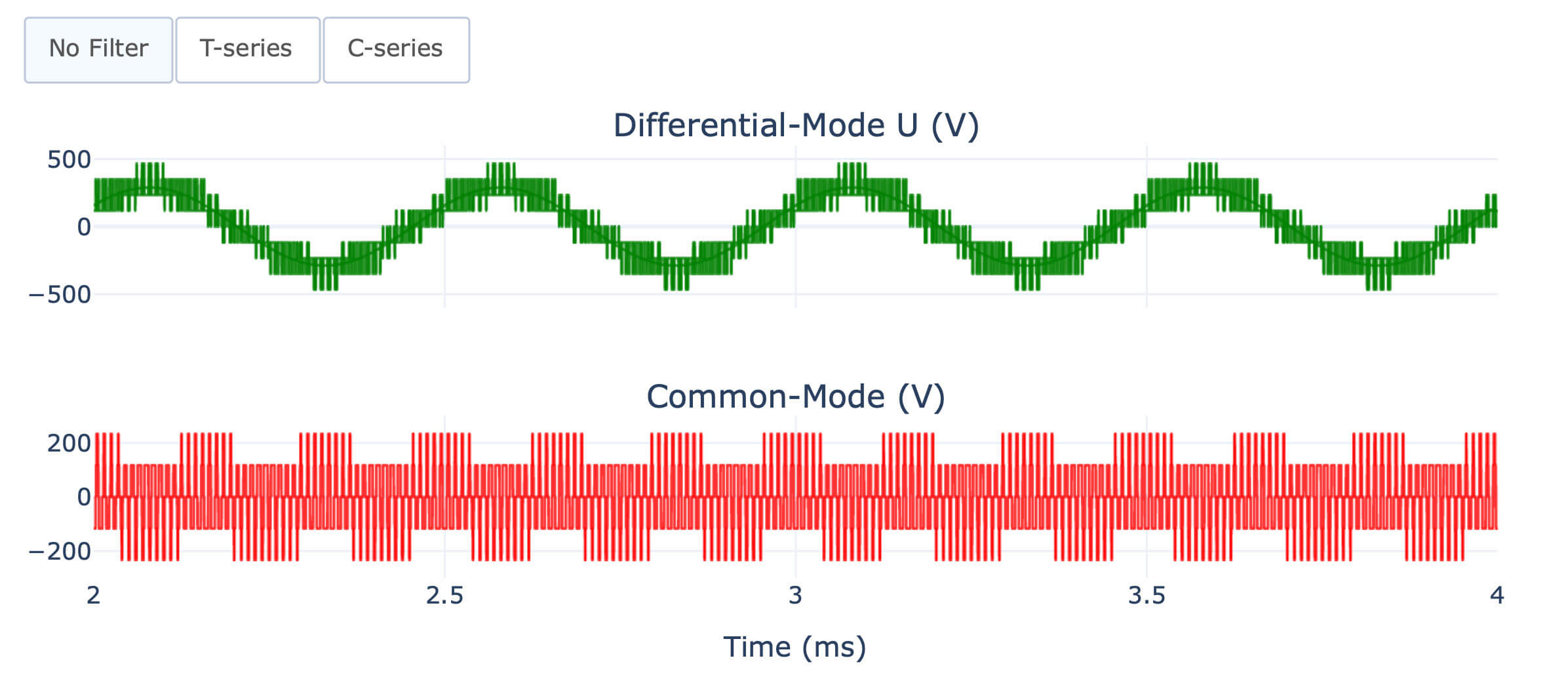
So funktionieren Triamec-Filter
Die motorseitigen Filter von Triamec lösen diese Probleme mit einem zweistufigen Ansatz:
- Sinusfilter – unterdrückt hochfrequente Spektralkomponenten der Differential-Mode-Spannung
- Common-Mode-Filter – dämpft die Common-Mode-Spannung
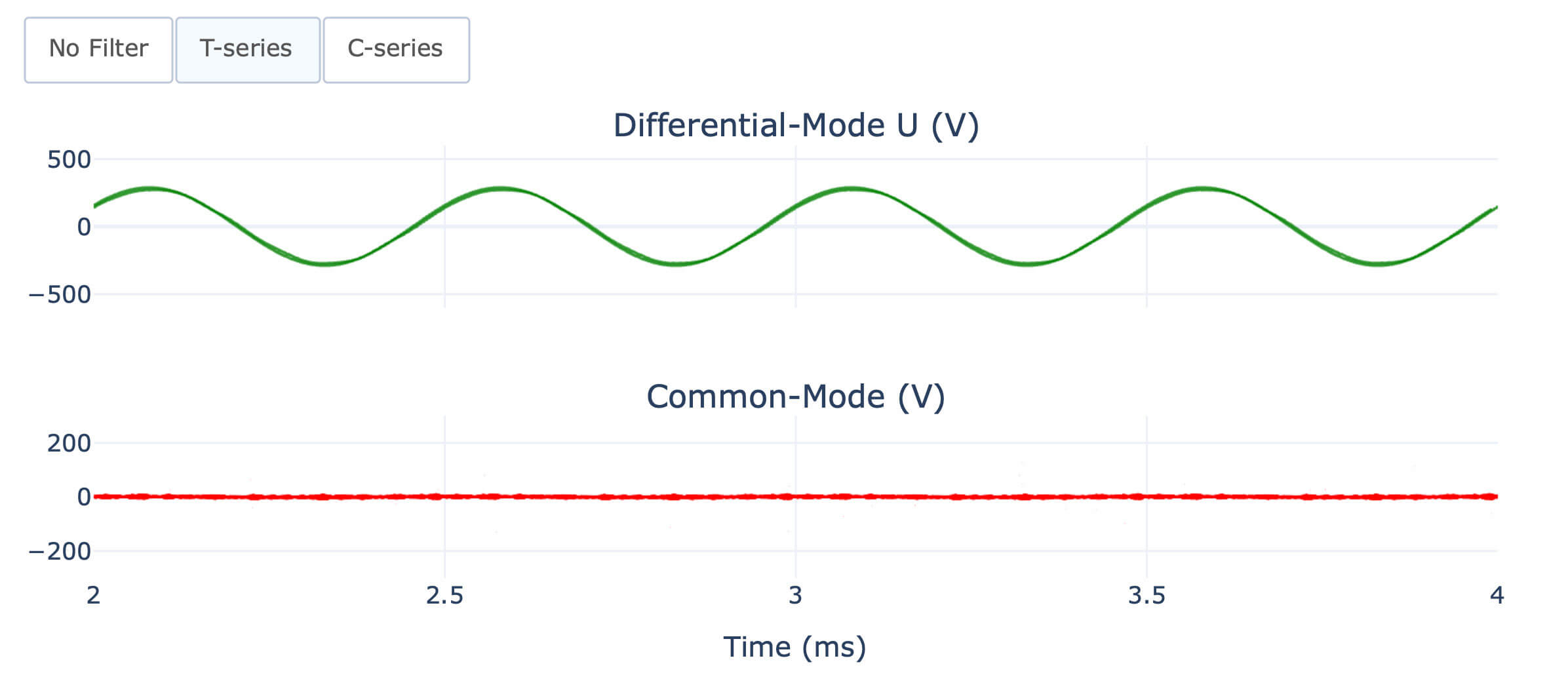
Triamec-Filter der T-Serie vereinen diese beiden Filterstufen in einem Produkt. Die Sinusfilterstufe beseitigt die Probleme des Differential-Mode. Die Induktivität des Filters muss jedoch den elektrischen Eigenschaften des Motors entsprechen, da es sonst zu Resonanzen in der Stromschleife kommen kann, die zu einer erheblichen Verringerung der Bandbreite des Stromreglers führen. Die Filter der T-Serie von Triamec sind für Motoren mit niedriger Induktivität wie Spindeln ausgelegt.
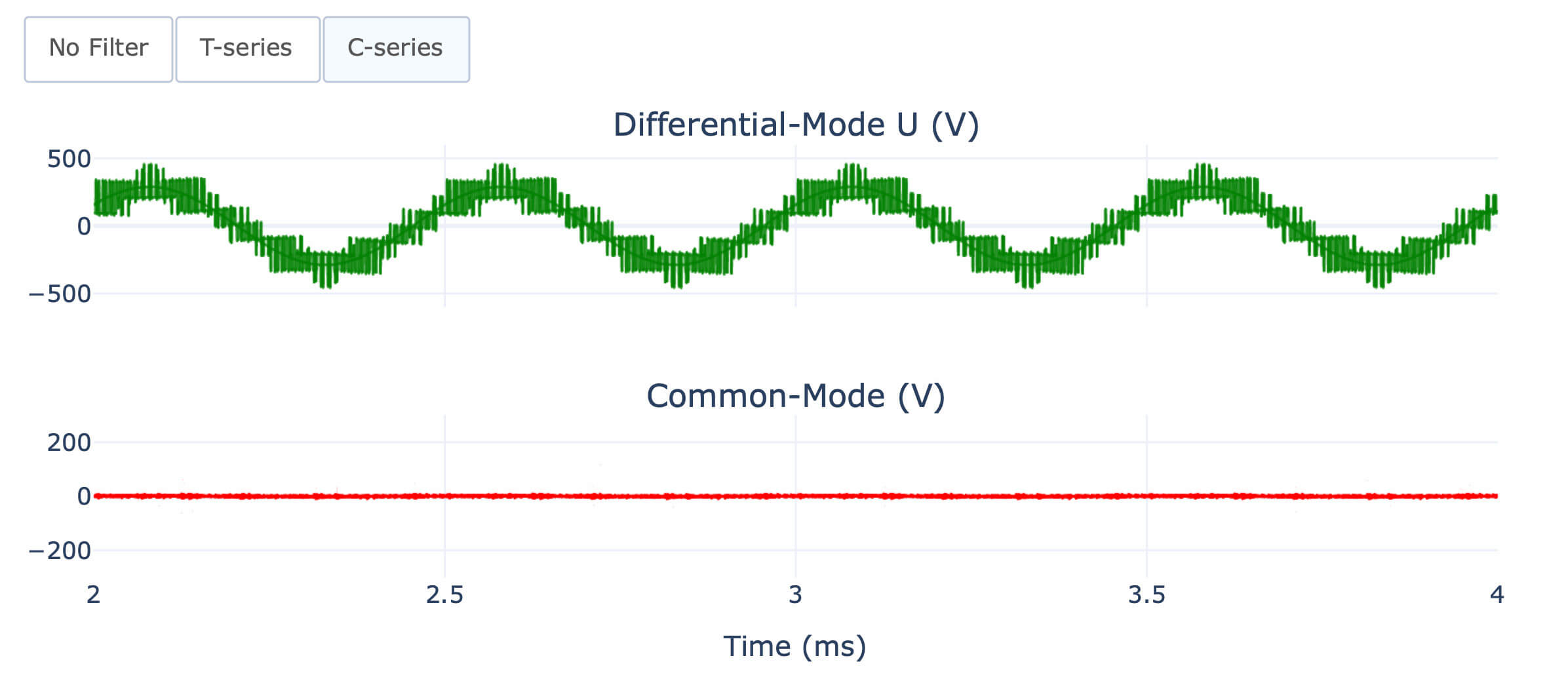
Für andere Motortypen bieten Filter der C-Serie eine effektive Lösung für die Differential-Mode Filterung. Dank einer minimierten Sinusfilterstufe gewährleisten diese Filter eine Common-Mode-Unterdrückung, ohne die Bandbreite des Stromreglers zu begrenzen.
Tipps zur Integration
- Verwenden Sie motorseitige Filter bei der Bearbeitung metallischer Werkstücke oder in EMV-kritischen Anwendungen (insbesondere bei Verwendung von Schwingspulen- oder offenen Motoren).
- Stellen Sie sicher, dass die PWM-Frequenz Ihres Antriebs den Spezifikationen des Filters entspricht (typischerweise ≥ 50 kHz).
- Installieren Sie den Filter so nah wie möglich am Antrieb und verwenden Sie kurze Motorkabel.
- Vergleichen Sie während der Abstimmung und Inbetriebnahme das Systemverhalten mit und ohne Filter.
- Quantifizieren Sie die Differential-Mode- und Common-Mode-Spannungen während des Betriebs mit einem Oszilloskop.