
Präzise Bewegungssteuerung mit 100 kHz
Triamec-Servoantriebe kombinieren Strom- und Positionsregler, die synchron mit 100 kHz arbeiten und damit die Regelgüte liefern, die für direktgetriebene Achsen in anspruchsvollen Anwendungen erforderlich ist. Die Architektur ermöglicht Standstill-Jitter unter 0,1 nm, schnelle Störgrössenunterdrückung und aktive Dämpfung mechanischer Resonanzen.
Die TSD-Serie integriert zwei vollständige Servoantriebe in einem kompakten Gehäuse für platzsparende Mehrachssysteme. Die TSP-Serie verfügt über ein integriertes AC-Netzteil und eine 3-Level-PWM-Technologie, welche die Verlustleistung und die thermische Belastung der Spindel reduziert.
Beide Serien unterstützen EtherCAT- und Tria-Link-Feldbuskonnektivität sowie optional den Standalone-Betrieb ohne Feldbus. Inbetriebnahme und Optimierung erfolgen über separate Ethernet- und USB-Schnittstellen, getrennt vom Feldbus, mit der TAM System Explorer Software für Echtzeitzugriff auf Register mit bis zu 100 kHz Abtastrate.
Downloads

Key features
Strom- und Positionsregelung bei 100 kHz
Wegplanung 10 kHz / Achsenkopplung 10 kHz
PID-Regelung mit 5 Filterblöcken, SI-Einheiten
Sin/Cos-Encoder mit 65536-facher Interpolation und automatischer Kalibrierung
Frei programmierbar in 10-kHz-Zyklen
Redundante sichere Drehmomentabschaltung
Key benefits
Höchste Steifigkeit
Schnelle Reaktion auf Störungen
Präzise Führung
Beste aktive Dämpfung von Resonanzen
Hervorragende Geräuschunterdrückung
Gemeinsame Features
| Motoren Konfiguration | 2- und 3-phasiger synchroner oder asynchroner Wechselstrom, Gleichstrom |
|---|---|
| Schutz | Übertemperatur: Antrieb, Motor (KTY83/84, PT100, PT1000, PTC-1K), i2t, Überspannung, Überstrom |
| Sicherheit | Sichere Drehmomentabschaltung: SIL3/PLe |
| Analoge Positionsmessung | sin/cos 1 Vss: 65536-fache Interpolation, automatische Kalibrierung, FIR-Filterung, 500 kHz Grenzfrequenz (echte Interpolation bis zu 2 MHz, Quadratur bis zu 10 MHz mit Optionsmodul) |
| Inkrementale Positionsmessung | RS422: max. Impulsfrequenz 10 MHz TTL: max. Impulsfrequenz 2,5 MHz |
| Digitale Positionsmessung |
EnDat 2.1 [&] 2.2, BiSS B, BiSS C, SSI, Tamagawa, Nikon (Encoder-Typen mit zusätzlichen Sinus-/Cosinus-Signalen werden empfohlen – Spezifikationen siehe „Analoge Positionsmessung”) |
| Sensorlos | Sensorlose Kommutierung/Steuerung, geeignet für schnelle Spindeln |
| Digitaler Eingang pro Achse | 6 Eingänge optional isoliert, 24 V, 2x 300 μs, 4x 1200 μs 4 TTL-Pegel-Allzweck-Digitaleingänge pro Achse am Encoder-DSub-Anschluss |
| Digitaler Ausgang pro Achse | 2 Ausgänge optisch isoliert, 24 V, 1 A |
| Optionsmodule | 2, jeweils mit einem D-Sub HD15-Anschluss, siehe Hardware-Optionen unten |
| Logikversorgung | 24 VDC ±10 % bei 1,5 A – max. 2,5 A (inkl. 2 Optionsmodule) |
| Feldbus | EtherCAT 100 Mbit/s / Tria-Link 200 Mbit/s. Tria-Link ermöglicht die direkte Übertragung von Werten von einem Servoantrieb zu anderen Antrieben auf demselben Bus. |
| Service-Schnittstellen |
USB / Ethernet |
| Programmierung innerhalb des Antriebs | Frei programmierbar mit Tama in 10 kHz Echtzeituhr in Microsoft® C#, incl. Achskupplungen; zusätzliche asynchrone Aufgabe |
| PC-Programmierung | TAM API for Microsoft® .NET Framework, Beckhoff TwinCAT with CNC, Python |
Technische Änderungen vorbehalten.
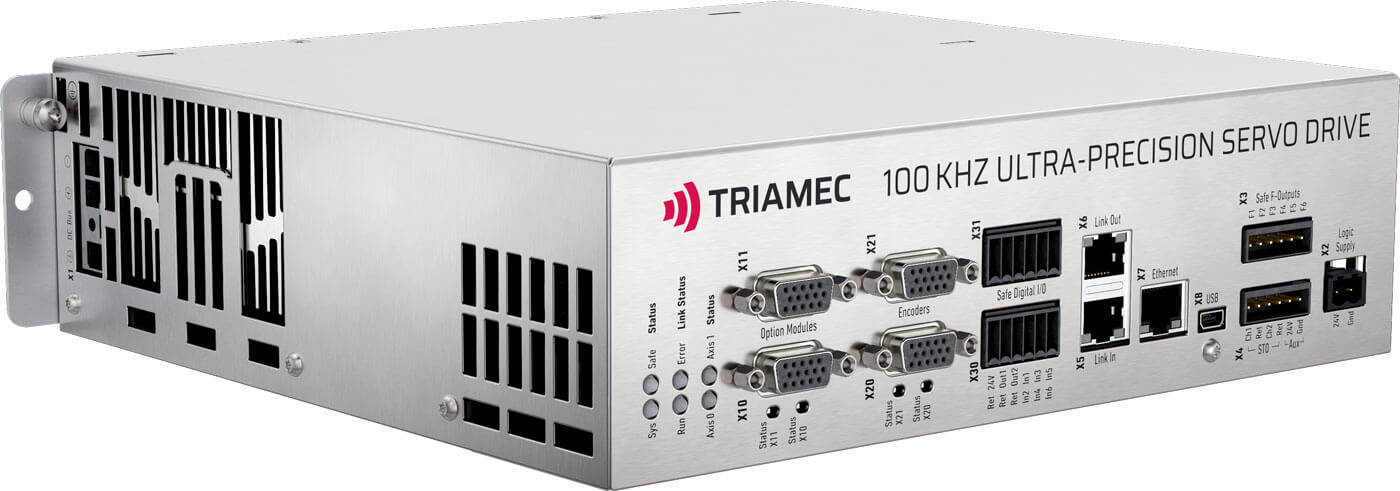
Schnittstellen


Produktserien

TSD Serie
Zwei vollständige Servoantriebe in einem Gehäuse für kompakte Mehrachssysteme. Verfügbar in drei Spannungsklassen (80 V, 130 V, 350 V) mit Stromstärken von 6 bis 15 ARMS pro Achse. Entwickelt für Anwendungen, die eine platzsparende Integration und eine synchronisierte Zweiachsregelung erfordern.

TSP Serie
Hochleistungs-Servoantriebe mit integrierter AC-Stromversorgung und 3-Level-100-kHz-PWM-Technologie. Die Drei-Level-Topologie reduziert die Verlustleistung erheblich, minimiert die thermische Belastung des Spindelmotors und erhöht die Gesamtpräzision. Geeignet für Hochgeschwindigkeitsspindeln und Anwendungen mit hoher Leistungsdichte.