
10-kHz-Feldbus mit Observer-Fähigkeit
- 10-kHz-Echtzeit-Feldbus
- Nicht-invasive Inspektion mit einem zweiten PC
Die Datenübertragung von bis zu 32 Teilnehmern in einem 10-kHz-Zyklus ermöglicht die Übertragung von Bewegungsdaten gekoppelter Achsen in voller Qualität der Bahnplanung. Darüber hinaus synchronisiert Tria-Link die Takte der Teilnehmer äusserst präzise (<<100 ns) und minimiert so den Jitter.
Alle Teilnehmerdaten können in Echtzeit und mit einer Taktrate von 100 kHz über den Tria-Link abgefragt und auf einem Host gespeichert, verarbeitet oder angezeigt werden.
Der Tria-Link ist als gegenläufiger Doppelring ähnlich dem Token Ring konzipiert. Dadurch erreicht er eine Übertragungsrate von 200 Mbit/s, doppelt so viel wie 100 Mbit/s Ethernet. Alle Bus-Teilnehmer können Daten direkt miteinander austauschen – es gibt keinen eigentlichen Bus-Master. Die PCI-Adapterkarten übernehmen lediglich die zusätzliche Aufgabe, den Ring zu starten und zu bereinigen, d. h. verlorene Datenpakete zu entfernen.
Tria-Link vs. EtherCAT
| Tria-Link | EtherCAT | |
|---|---|---|
| Topologie |
Alle Knoten können direkt miteinander kommunizieren. |
Master-Slave |
| Jitter | Präzise synchronisierte Kommunikation von bis zu 32 Antrieben mit 10-kHz-Synchronbefehlen, ±25-ns-Genauigkeit, unter Verwendung eines abstimmbaren Oszillators ohne Sprungzyklen. |
< 1 μs |
| Datenrate | 200 Mbps | 180 Mbps |
| Zyklischer Datenverkehr | Kann jederzeit gestartet werden | Muss vor dem Ringstart eingestellt werden. |
| TwinCAT-Integration | Verwendung der Triamec-Bibliothek | Standard-CoE-Client. |
Technische Änderungen vorbehalten.
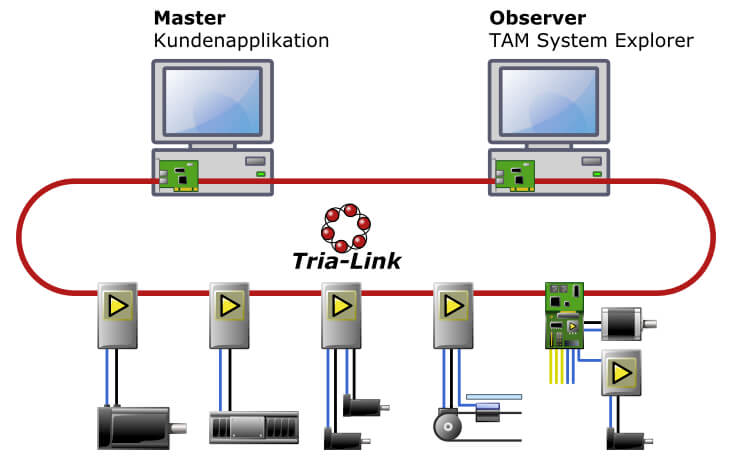
Observer - Nicht-invasive Inspektion
Die Observer-Funktionalität ermöglicht einen nicht-invasiven Eingriff in ein laufendes System. Alle Systemzustände können in Echtzeit mit bis zu 100 kHz beobachtet und mit dem TAM System Explorer aufgezeichnet werden. Selbstverständlich können auch Parameter, z. B. Regelgrössen, während des Betriebs geändert werden.
Typische Anwendungsbereiche sind Systeme, in denen Echtzeitumgebungen wie Beckhoff TwinCAT zum Einsatz kommen. Grundsätzlich ermöglichen diese Systeme zwar auch eine Datenerfassung, jedoch nicht mit dem Komfort und der Abtastrate des TAM System Explorers.
Ein weiteres Beispiel ist die Integration komplexer Online-Messsysteme, die auf eigenen PCs laufen, aber synchron mit Echtzeit-Messdaten versorgt werden müssen.
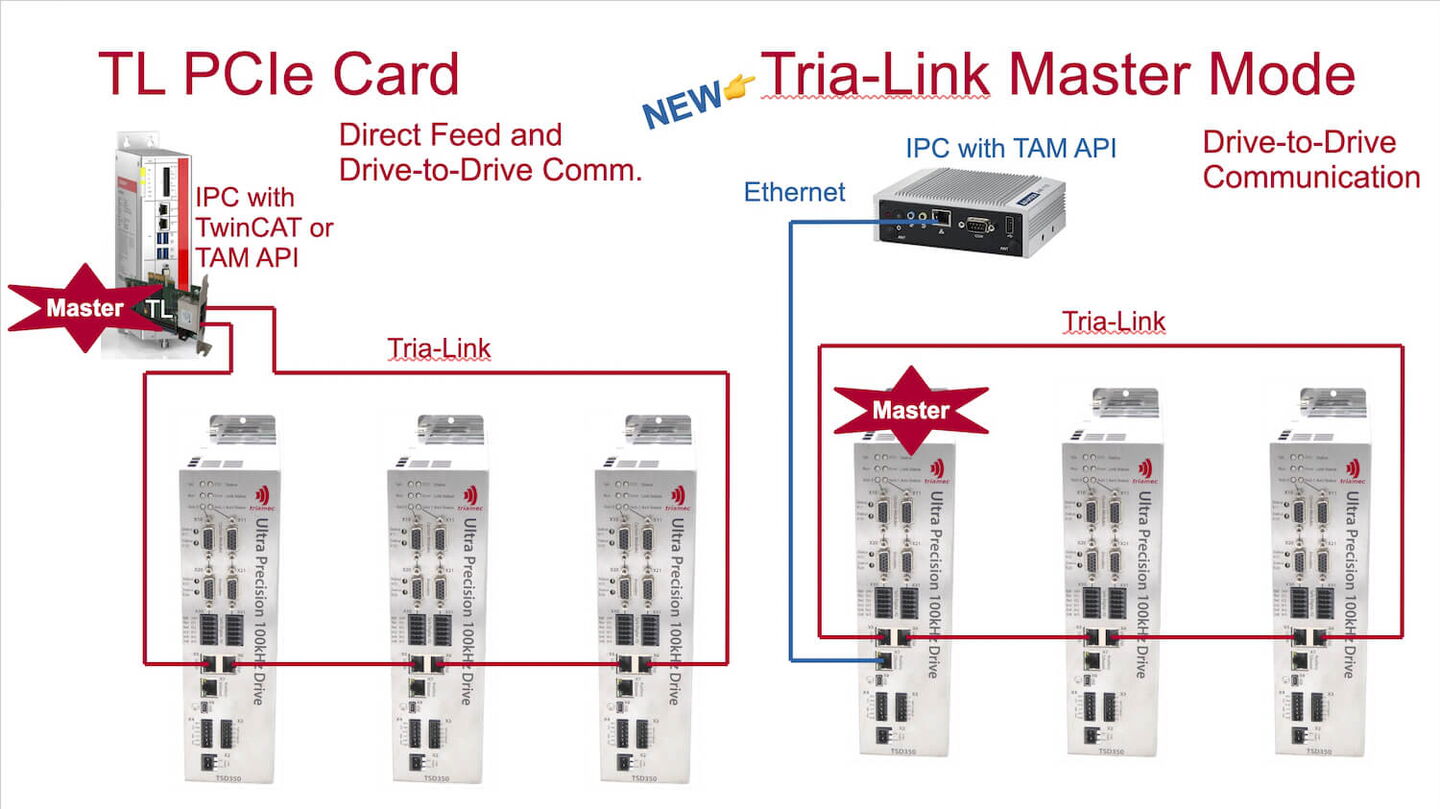
Tria-Link-Master-Modus
Alternativ zur Verwendung eines TL-PCIe-Adapters kann ein Servoantrieb im Tria-Link-Master-Modus verwendet werden, um mehrere Antriebe miteinander zu verbinden. Der Master-Servoantrieb wird dann über Ethernet mit einem Industrie-PC verbunden.
In Kombination mit der TAM API bietet dies eine flexible und kostengünstige Lösung für Maschinen, die weder TwinCAT noch Direct Feed benötigen, z. B. die meisten Wafer-Stages.